6 Critical Questions About PathPlan
Consider how an industrial robot performs a given task – such as applying a coating or deburring the edge of a particular work piece.
To perform their duties, most industrial robots are programmed to strictly follow motion sequences. They move only in a programmed path to perform the task and require a programmer to maneuver around any complex spots. When manufacturing or maintenance tasks are repetitive and straightforward, this approach makes sense. The robot doesn’t need to “know” anything about its environment or its surroundings. Manual programming is cost-effective and safe, and the robot simply needs to follow the software’s programming.
But what about tasks that are less predictable? What about tasks that are within close-quarter confined spaces, or tasks that must be performed on complex or highly-valuable surfaces? The time and programming expertise required to precisely define and program the exact sequence of motions for the robot without collisions makes automating these tasks cost prohibitive, if not impossible.
Until now. To help companies automate their most complex industrial tasks, Battelle developed an intuitive and easy-to-use scan-to-path and/or CAD-to-path software that integrates with nearly every major robotics platform in use today.
We call this software PathPlan™
The official name is PathPlan™: Autonomous Motion Planning Software. So, what’s it actually mean?
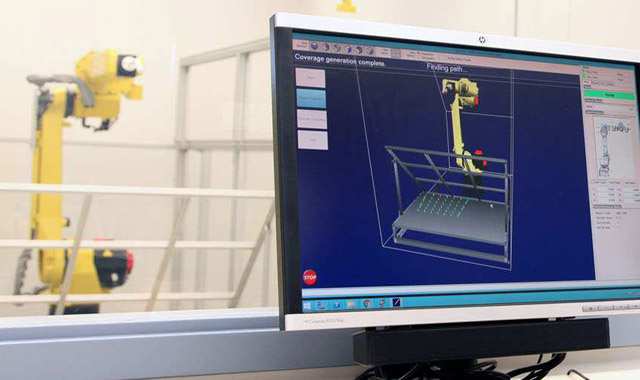
PathPlan is software that uses reliable CAD or sensor data to plan the most effective and collision-free path to accomplish an outlined task completely on its own. The same software can also be used for real-time monitoring of pre-planned, high-risk automated tasks. It enables you to optimize your systems to perform previously impossible tasks, with minimal programming time required, while also maintaining enough flexibility to enable quick transitions from automated to manual operations.
How easy is PathPlan to learn or operate?
PathPlan requires minimal programming knowledge or time to operate.
The software features an easy-to-use “point-and-click” interface, which gives the operator a clear picture of the robot and its surrounding environment. Instead of relying on a skilled programmer to script each motion, PathPlan utilizes scan-to-path, CAD-to-path or hybrid data to autonomously determine the optimal, collision-free path to execute the task–resulting in less reliance on skilled programmers and up to 80 percent reductions in overall programming time and cost.
What’s the difference between collision detection, collision avoidance, and collision-free path planning?
Collision detection is when a robot senses that it has run into something, resulting in either a shut down or change of direction. This is accomplished through equipping a robot with sensors. This is a less-than-ideal approach for powerful industrial robots that might break a wall, a window or an expensive piece of equipment in a collision.
Conversely, collision avoidance systems allow the robot to take proactive steps to avoid a collision, either stopping its own motion before a collision takes place or alerting the programmer if the motion path that has been programmed will result in a collision. This requires the robot to have both a representation of itself and a representation of the environment around it.
Collision-free path-planning means the software takes into account the limitations of its environment, including the work surface, other equipment, joint limits and more, and plans the optimal path without collisions. If problems are encountered, the software will provide the option to change the environmental limitations or proceed and simply avoid any motion that would cause a collision or violate the parameters provided.
What hardware is needed to work with PathPlan?
The hardware selection is specific for each project, but requires an enhanced laptop at minimum to run PathPlan and interface between the software and the robot controller. Other hardware which may be needed in the work cell can include a scanner and possibly a server depending on the speed/cycle time required for the application.
How is PathPlan different from offline programming software?
PathPlan can be used as an off-line programming tool, however the main benefit of PathPlan is the ability of the software to control the robot in real time. This provides autonomous motion planning and collision avoidance in both run-time and teach mode settings.
Can PathPlan be used during “Teach Mode”?
PathPlan can provide collision avoidance during run time as part of the autonomous motion planning process, as well as during “Teach Mode” or manual operations.
The Teach Mode Module of the PathPlan software provides collision avoidance during manual or teach mode operations to protect the robot cell and work piece during the most likely times of a collision. In addition to the greatly reduced programming time for run time operations, the Teach Mode Module mitigates vulnerabilities during operations that are not pre-scripted or when stepping through already scripted paths.
What unique advantages does PathPlan offer over other collision detection software?
PathPlan offers a variety of benefits and advantages, depending upon the level of need. The technology is platform agnostic – meaning that it enables you to upgrade your current equipment to automate your specific tasks.
From a workflow viewpoint, the software significantly reduces manual operation errors and damage, and requires significantly less set-up time. It allows you to automate tasks within confined or hazardous spaces, as well as tasks that require real-time adaption to the surface of a work piece.
From a cost-savings perspective, PathPlan has the potential to deliver up to 80 percent reduction in programming costs – through reduction in programming time and your reliance on skilled programming labor. It increases the safety, efficiency and effectiveness of your most challenging tasks.
The Future of Autonomous Motion Planning
PathPlan software is already in use by the U.S. military, defense equipment manufacturers and automotive research and development departments to automate complex tasks including fuel tank inspection, canopy restoration, application of precision coatings for aircraft, and non-destructive inspection. Battelle is applying the software across more applications and environments, and welcomes unique challenges.
Learn how PathPlan is helping companies make all the right moves to solve their toughest challenges here.Related Blogs


Delivering tomorrow’s solutions, today. Advancing technology for our warfighters and the future of RF.
Read More


BATTELLE UPDATES
Receive updates from Battelle for an all-access pass to the incredible work of Battelle researchers.